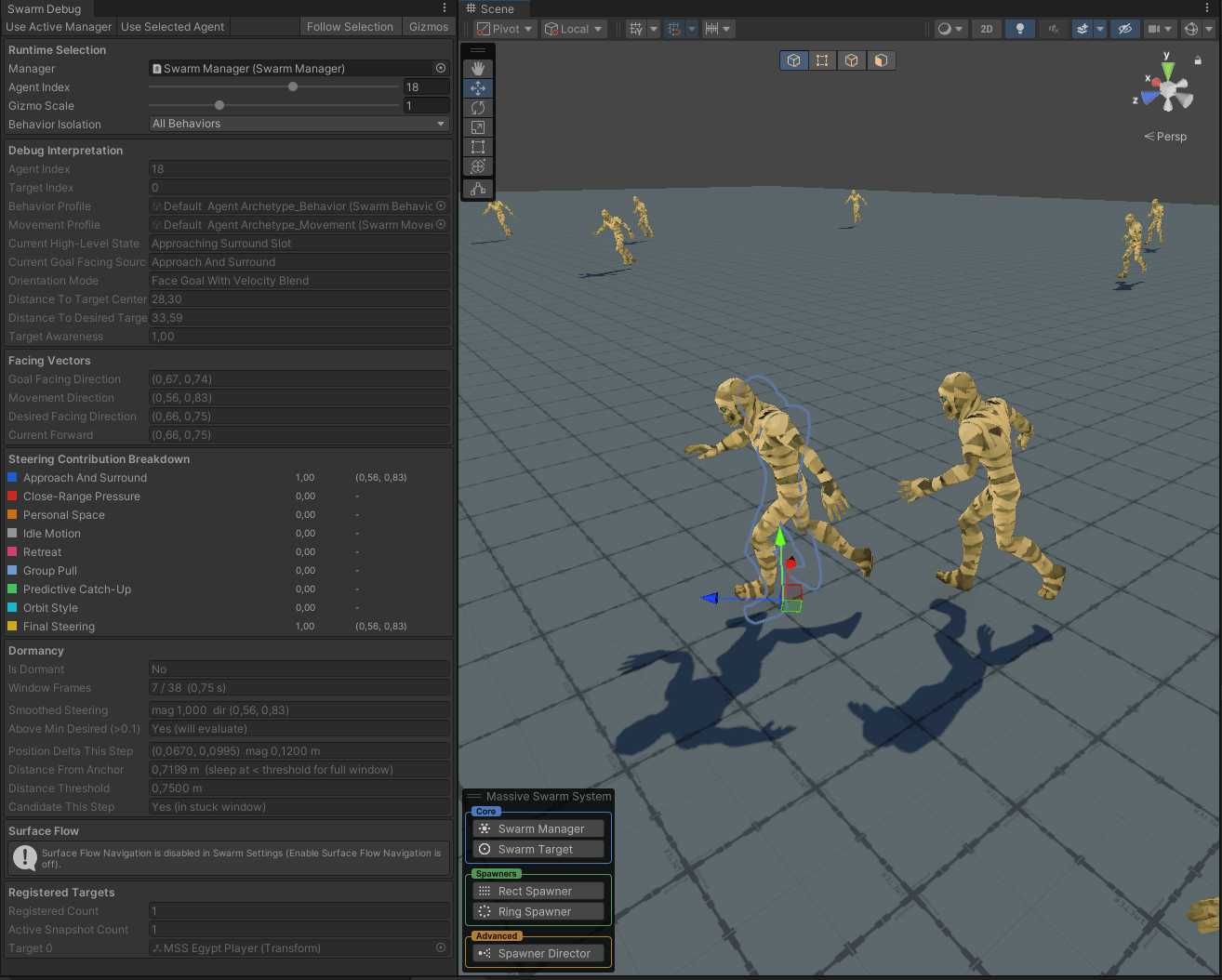
Swarm Debug¶
Swarm Debug is an editor window that shows the live steering state of one agent at a time during Play mode. Use it when something looks wrong on a specific enemy — wrong movement, unexpected facing, a behavior with no visible effect — and you need to trace the cause back to a specific steering contribution or configuration value.
Open the debugger when...
- An agent runs in the wrong direction and you can't tell which behavior is responsible.
- Dormancy seems to activate or not activate unexpectedly.
- A behavior profile change has no visible effect on a specific agent.
- Surface Flow routes an agent into a wall or off the grid.
Menu path: Tools > Massive Swarm System > Swarm Debug
The window docks anywhere in the editor layout. Its data only populates in Play mode.
Gizmos toggle draws those same contributions as colored vectors from the agent.Selecting an agent¶
Three ways to point the debugger at an agent:
- Click an agent visual in the Scene view with
Follow Selectionenabled (the default). The window automatically updates to the selected agent's manager and index. - Click a
SwarmManagerGameObject in the Hierarchy. The window keeps the current index but switches to that manager. - Set the index manually using the
Agent Indexslider or field in the Runtime Selection panel.
The toolbar also has two explicit buttons: Use Active Manager picks the first active SwarmManager in the scene; Use Selected Agent reads the manager and index from whatever is currently selected in the Scene or Hierarchy view.
Agent Index is the agent's slot in the simulation arrays — it stays stable until the agent is despawned and its slot is reused.
Toolbar controls¶
| Control | What it does |
|---|---|
| Use Active Manager | Assigns the first active SwarmManager found in the scene. |
| Use Selected Agent | Reads the manager and index from the currently selected agent visual. |
| Follow Selection | When on, any scene or hierarchy selection that contains an agent automatically updates the debugger target. |
| Gizmos | When on, steering contribution vectors are drawn as colored lines in the Scene view for the selected agent. |
Runtime Selection panel¶
This panel sits below the toolbar and is always visible.
| Field | What it shows |
|---|---|
| Manager | The SwarmManager being inspected. Drag a different manager here to switch. |
| Agent Index | The simulation slot index (0 to active count − 1). A slider appears when agents are active. |
| Gizmo Scale | Scales the length of the Scene-view steering vectors. Range 0.25 to 3. |
| Behavior Isolation | Switches the manager's behavior isolation mode. See Behavior Isolation Mode below. |
A yellow warning appears when isolation is active — the simulation is no longer running all behaviors, so results shown are diagnostic only.
Scene Gizmos¶
The Scene Gizmos foldout sits between the Runtime Selection panel and the scrolled content. It controls per-agent overlays drawn in the Scene view while the window is open in Play mode. Close the window and all per-agent overlays disappear — debug state no longer serializes into scenes.
These gizmos apply only to the manager the window is currently inspecting.
| Control | Default | What it draws |
|---|---|---|
| Desired Target Position | On | A dotted line from each agent to the point it is steering toward — its standoff seek position near the target. |
| Movement Direction | Off | An arrow along each agent's current velocity. |
| Arrow Length | 1 | World-unit length of each movement-direction arrow. Range 0.25–5. Enabled only when Movement Direction is on. |
| Personal Space | Off | Each agent's personal-space radius and its spatial-hash grid cell. |
| Dormancy | Off | Tints sleeping agents and shows the stuck-window progress ring. |
| Selected Agents Only | On | Limits all the gizmos above to the focused agent (set by Agent Index) plus any agents selected in the Scene or Hierarchy. Turn off to draw them for every active agent — expensive in large swarms. |
Scene Gizmos vs. toolbar Gizmos — these are separate controls. The toolbar Gizmos toggle draws steering contribution vectors for the focused agent (the colored lines matching the Steering Contribution Breakdown rows). The Scene Gizmos foldout draws the per-agent overlays listed above. Both can be on at the same time.
Debug Interpretation panel¶
Shows high-level agent intent for the selected simulation step.
| Field | What it means |
|---|---|
| Agent Index | The simulation slot index, confirmed from the snapshot. |
| Target Index | Which registered SwarmTarget this agent is currently pursuing. Shows None if no target is assigned. |
| Behavior Profile | The SwarmBehaviorProfile asset driving this agent. Shows Built-in Defaults if no profile is assigned. |
| Movement Profile | The SwarmMovementProfile asset driving speed and acceleration for this agent. |
| Current High-Level State | A readable summary of what the agent is trying to do. See High-level states below. |
| Current Goal Facing Source | Which behavior is currently supplying the goal facing direction — the direction the agent wants to face before blending. |
| Orientation Mode | The orientation mode from the agent's archetype (e.g. Face Movement Direction, Face Target). |
| Distance To Target Center | Planar world-unit distance from this agent to its target's position. N/A if no target. |
| Distance To Desired Target Position | Distance to the agent's standoff seek position near the target, when one is computed. N/A if not applicable. |
| Target Awareness | A 0–1 value. Low values mean the agent is far from or has recently lost sight of its target; full approach behavior only runs at high awareness. |
High-level states¶
| State | Meaning |
|---|---|
| Idle / No Clear Goal | No target, or no combined steering this step. |
| Approaching Standoff | Beyond Arrival Distance from its standoff seek position (still moving in toward the target), or steering with no target-relative desired position. |
| Pressing Target | Arrived within Arrival Distance of the standoff seek position and still steering (pressing in at the combat standoff). |
| Lost Target Following Crowd | The out-of-sight fallback is active (following the crowd toward the last-known target). |
Facing Vectors panel¶
Shows the four direction values the simulation tracks for orientation blending.
| Field | What it means |
|---|---|
| Goal Facing Direction | The normalized direction supplied by the highest-priority behavior for facing. |
| Movement Direction | The direction the agent is currently moving — used as a facing fallback when no behavior claims priority. |
| Desired Facing Direction | The blended target direction before the movement profile's turn-speed clamping is applied. |
| Current Forward | The agent's actual forward direction this step, after turn-speed clamping. |
All vectors show as (x, z) normalized pairs. A dash (-) means the vector is near-zero.
Steering Contribution Breakdown panel¶
Each row shows one behavior's contribution to the final steering direction. Each row has a color swatch, a magnitude, and a normalized direction.
| Behavior | Color |
|---|---|
| Approach & Press | Blue |
| Personal Space | Orange |
| Idle Motion | Light grey |
| Retreat | Pink |
| Group Pull | Light blue |
| Predictive Catch-Up | Green |
| Orbit Style | Cyan |
| Final Steering | Yellow |
Final Steering is the accumulated result after all weighted contributions are combined. When a behavior's magnitude reads 0.00, it is either disabled, not active this step (due to LOD tier), or its conditions are not met.
When Gizmos is on in the toolbar, these same contributions are drawn as colored vectors in the Scene view from the agent's position.
Dormancy panel¶
Shows the dormancy system state for the selected agent. Only relevant when Enable Dormancy is on in SwarmSettings.
| Field | What it means |
|---|---|
| Is Dormant | Whether the agent is currently sleeping (no steering computation). |
| Window Frames | Frames spent in the stuck-detection window, and the required frame count before sleep triggers. |
| Smoothed Steering | The low-pass filtered steering magnitude used to decide if the agent is trying to move. |
| Above Min Desired (>0.1) | Whether the smoothed steering magnitude is high enough to even evaluate dormancy. Agents that aren't trying to move skip the dormancy check entirely. |
| Position Delta This Step | How far the agent moved in the last simulation step. |
| Distance From Anchor | Distance from the position where the stuck window started. When dormant, waking requires this distance to exceed the threshold. |
| Distance Threshold | The world-unit distance required to trigger either sleep (too little movement) or wake (enough displacement). |
| Candidate This Step | A summary of why this agent is or is not a dormancy candidate this step. |
When dormant, additional fields appear: the frozen desired direction, wake lookahead distance, wake cone half-angle, required blocker count to stay asleep, whether a target move triggers an immediate wake, the random-wake probe interval, and the nearby-motion-wake radius and minimum speed.
Surface Flow panel¶
Shows the flow field state for the selected agent. Only populates when Enable Surface Flow Navigation is on in the SwarmManager.
| Field | What it means |
|---|---|
| Resolved Target Slot | Which flow goal field is bound to this agent's current target. |
| Goal Cell Index | The grid cell index the flow field routes toward (the target's cell). |
| Reachable / Unreachable | Grid-wide count of reachable vs. unreachable cells in the current bake. |
| Bake Data Version | Increments each time the field is rebaked. Useful for confirming a bake has completed. |
| Grid Size | Grid dimensions in cells and the world-unit size per cell. |
| Cell Coords | The (x, z) grid coordinates and flat cell index for the agent's current position. |
| Cell Status | One of: Flow (routed), Goal cell, Unreachable (no path from goal), Unwalkable (no surface sample), Off Grid. |
| Cell Surface Y | The baked surface height at this cell, plus how far above it the agent currently sits. |
| Cell Flow Direction | The compass direction the flow field sends agents from this cell toward the goal. A dash means no flow (goal cell or blocked). |
| Neighbour Connections | A 3×3 compass grid showing which of the eight adjacent cell connections are open (green) or blocked (red). |
If the agent is off the grid, the panel shows a warning and the Cell Status only. If the field has no bake yet, a warning indicates the bake may still be in flight.
Behavior Isolation Mode¶
Behavior isolation is an editor-only debug tool. It overrides the simulation on the selected manager so only a subset of behaviors runs. Use it when a behavior change has no visible effect and you want to confirm it is actually contributing, or to identify which behavior is causing an unexpected result.
Isolation changes live simulation
While isolation is active, the whole swarm on that manager runs with reduced behaviors — not just the selected agent. Results are not representative of real gameplay. Always reset to All Behaviors before testing performance or tuning values.
The Behavior Isolation dropdown in the Runtime Selection panel sets the mode. Options:
| Mode | What runs |
|---|---|
| All Behaviors | Normal blended simulation. This is the default. |
| Approach And Press Only | Only the Approach & Press pass runs. All others are suppressed. |
| Personal Space Only | Only the personal-space separation pass runs. |
| Idle Motion Only | Only the idle motion pass runs. |
| Retreat Only | Only the retreat pass runs. |
| Group Pull Only | Only the group pull pass runs. |
| Predictive Catch-Up Only | Only the predictive catch-up pass runs. |
| Orbit Style Only | Only the orbit style pass runs. |
| Mute Approach And Press | All behaviors run except Approach & Press. |
| Mute Personal Space | All behaviors run except personal space. |
To return to normal blending: set the dropdown back to All Behaviors.
Isolation mode is stored on the SwarmManager component and supports Undo. It is not serialized to any behavior profile asset — it does not edit your settings.
Related pages¶
- Behaviors — behavior descriptions and the runtime blending model.
- Performance — Stats Overlay and step timing tools for aggregate swarm metrics.
- Troubleshooting — common setup and behavior problems with fixes.
- Navigation — Surface Flow Field setup and bake configuration.